激光雷达
激光雷达传感器可以与 Donkeycar 一起使用,用于避障或在有墙壁的赛道上进行导航。它在训练过程中与相机一起记录数据,并可用于训练。
支持的激光雷达
目前我们仅支持 RPLidar 、YDLidar系列的传感器。
我们推荐使用 思岚A1M8(12m 范围)。 YDLidar X4
硬件设置
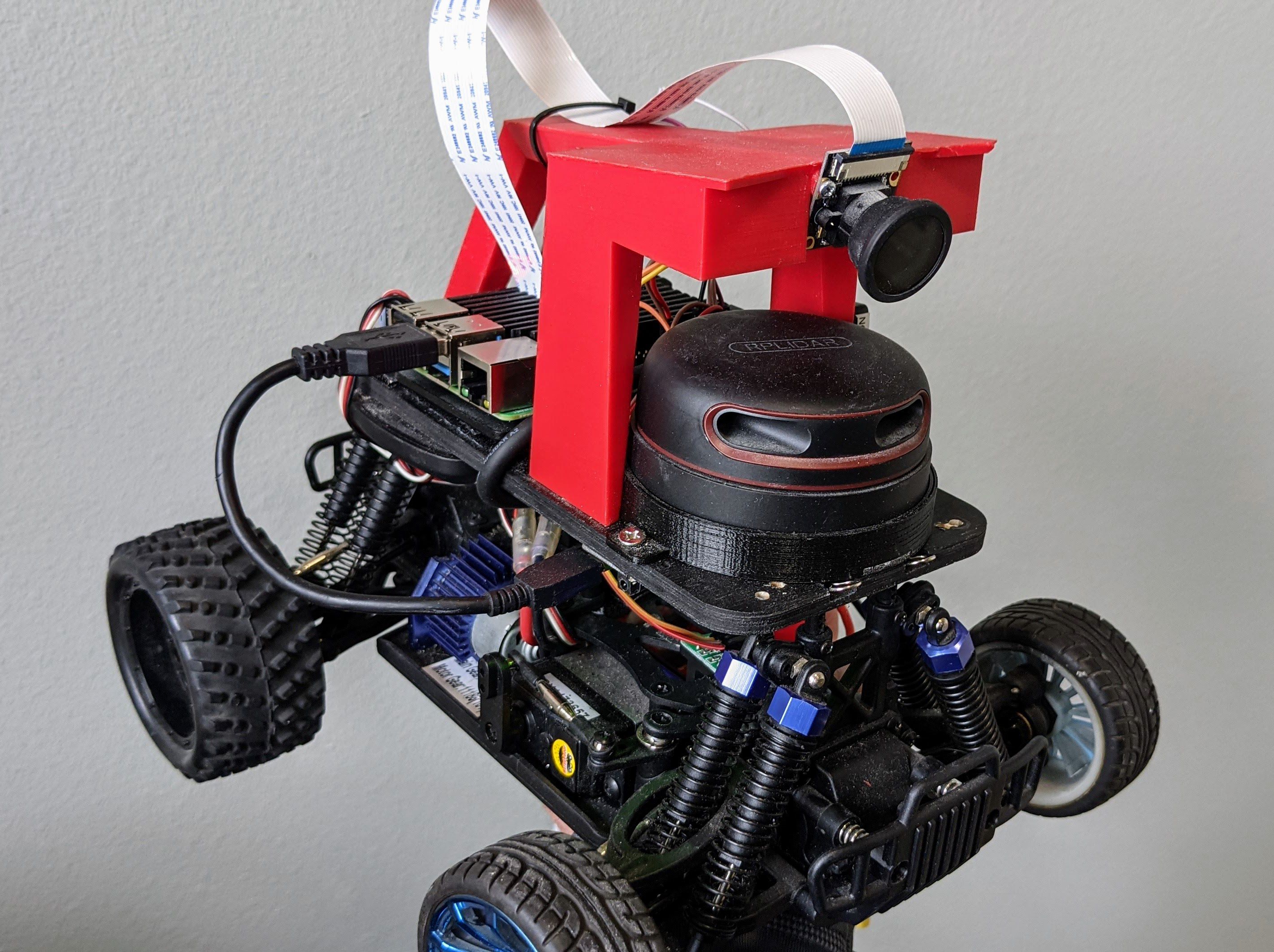
按照上面的示例将激光雷达安装在相机罩下方(上面使用的是 RPLidar A2M8,但 A1M8 的安装方式相同)。您可以使用绑带将 USB 适配器固定在 Donkey 平台下方,并使用短的 USB 电缆连接到您的 RPi 或 Nano 的一个 USB 端口。它可以通过 USB 端口供电,因此无需额外的电源供应。
软件设置
激光雷达需要安装 glob 库。如果您还没有安装它,请使用 pip3 install glob2 命令进行安装。
还需安装激光雷达驱动程序:pip install Adafruit_CircuitPython_RPLIDAR
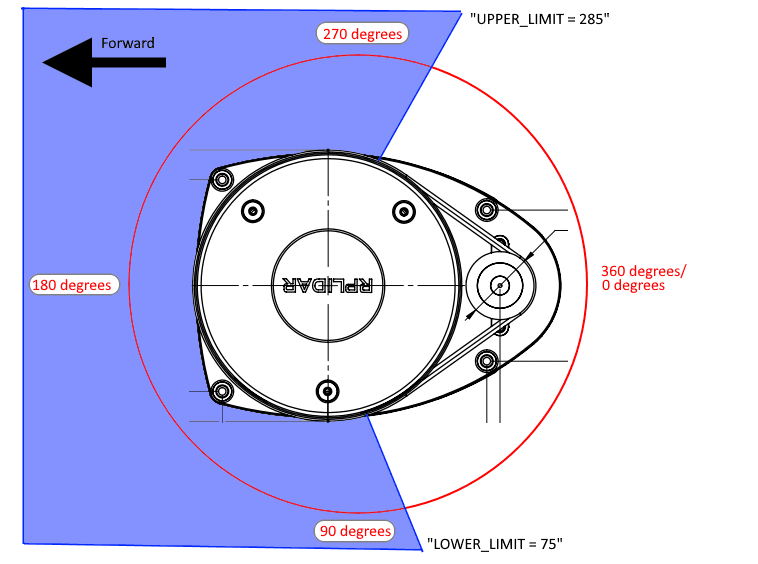
然后进入 lidarcar 目录,编辑 myconfig.py 文件以确保激光雷达已打开。上限和下限应设置为反映您希望激光雷达“观察”的区域,省略被汽车车身部分阻挡的区域。下面是一个示例。对于 RPLidar 系列,0 度是指向电机的方向(对于 A1M8)或电缆的方向(对于 A2M8)。
# LIDAR
USE_LIDAR = True
LIDAR_TYPE = 'RP' #(RP|YD)
LIDAR_LOWER_LIMIT = 90 # 这些角度将被记录下来。您可以使用它们来屏蔽车辆上被阻挡的区域和避免向后看。请注意,对于RP A1M8激光雷达来说,"0"表示朝着电机的方向。
LIDAR_UPPER_LIMIT = 270
模板支持
无论是深度学习模板还是路径跟随模板都不直接支持激光雷达数据。有一个问题要将激光雷达数据添加到深度学习模板中。对于路径跟随模板来说,激光雷达在障碍物检测和避免方面也非常有用。如果您有兴趣参与这样的项目,请加入 Discord 社区并告诉我们,我们将很乐意为您提供支持。