驾驶您的车辆
在完成校准您的车辆之后,您可以开始驾驶它。
如果您还没有这样做,请通过SSH连接到您的车辆。
启动您的车辆
*** 将您的车辆放在一个安全的地方,使车轮离地 ***。
这是车辆可能起步的步骤。
打开您的车辆文件夹并启动您的车辆。
cd ~/mycar
python manage.py drive
这个脚本将启动您车辆的驾驶循环,其中包括一个作为Web服务器的部分,供您控制您的车辆。现在,您可以通过Web浏览器在以下URL上控制您的车辆:<您的车辆主机名.local>:8887
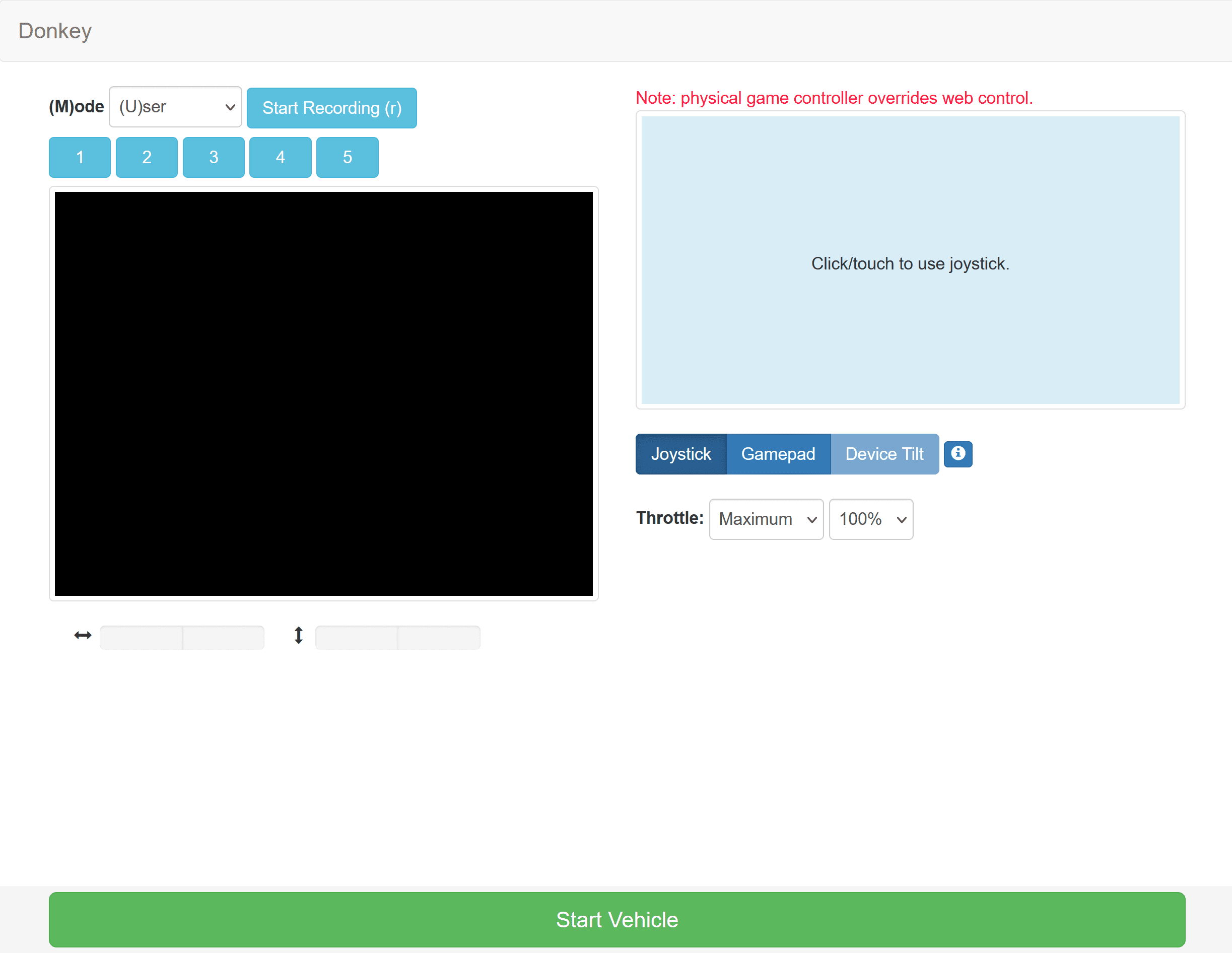
使用Web控制器驾驶
有三种方式可以使用Web控制器来驾驶车辆: - 设备倾斜(Device Tilt): 在Web控制器的控制模式部分选择设备倾斜。然后在模式部分选择用户。您可以倾斜手机向前增加油门,向两侧倾斜转动方向盘。 - 摇杆(Joystick): 在Web控制器的控制模式部分选择摇杆。然后在模式部分选择用户。然后您可以触摸并拖动出现的虚拟摇杆区域。向上移动增加油门,向下移动减小或倒车。向左转弯左,向右转弯右。松开手指停止。 - 游戏手柄(Gamepad): 如果您在查看Web界面的计算机上连接了游戏手柄(通过电缆或蓝牙),并且该游戏手柄与HTML5 Gamepad API兼容,则可以在Web控制器的控制模式部分选择游戏手柄。然后在模式部分选择用户。然后您可以使用游戏手柄驾驶Donkeycar。
功能
- 录制 - 按下记录数据按钮开始录制图像、转向角和油门值。
- 油门模式 - 可选择将油门设置为恒定值。在比赛中,如果您有一个负责转向但不控制油门的驾驶员,可以使用此选项。
- 驾驶员模式 - 如果驾驶员应该控制转向角和/或油门,请选择此选项。
- 最大油门 - 选择最大油门值。
键盘快捷键
空格键:停止车辆和停止录制r:切换录制状态i:增加油门k:减小油门j:左转l:右转
如果您没有摇杆,您可以跳过下一节 - 训练自动驾驶。
使用物理摇杆控制驾驶
您可能会发现使用物理摇杆设备来控制您的车辆会更方便。
设置蓝牙并配对摇杆
请查看控制器部分以了解如何设置蓝牙连接。
启动车辆
cd ~/mycar
python manage.py drive --js
如果您希望使用摇杆时保持粘性,并且不想每次都添加--js选项,请修改您的__myconfig.py__文件,将__USE_JOYSTICK_AS_DEFAULT = True__。
nano myconfig.py
摇杆控制
- 左摇杆 - 左右移动调整转向
- 右摇杆 - 向前移动增加前进油门
- 在右摇杆上向后拉动两次以倒车
只要油门不为零,驾驶数据就会被记录下来 - 只要您处于用户模式下!
- 选择按钮切换模式 - "用户模式、本地角度模式、本地(角度和油门)模式"
- 三角形按钮 - 增加最大油门值
- X按钮 - 减小最大油门值
- 圆形按钮 - 切换录制(默认禁用。默认情况下启用油门自动录制)
- 十字键上 - 增加油门比例
- 十字键下 - 减小油门比例
- 十字键左 - 增加转向比例
- 十字键右 - 减小转向比例
- Start按钮 - 切换恒定油门。设置为最大油门(由X和三角形按钮修改)。